Сделать самый простой робот под силу даже тем, кто только взял в руки паяльник.
Преимущественно наш робот (в зависимости от конструкции) будет бегать на свет либо наоборот убегать от него, бежать вперед в поисках луча света или же пятиться как крот назад.
Для нашего будущего «искусственного интеллекта» понадобятся:
- Микросхема L293D
- Маленький электромотор М1 (его можно вытащить из игрушечных автомобилей)
- Фототранзистор и резистор с номиналом 200 Ом.
- Провода, батарейка и, конечно же, сама платформа, где это все будет размещаться.
Если в конструкцию добавить еще парочку ярких светодиодов, то легко можно добиться, того, что робот просто будет бегать за рукой или даже следовать по светлой или темной линии. Наше создание будет типичным представителем роботов класса BEAM. Принцип поведения таких роботов заключается на «фоторецепции», то есть свет, в данном случае, будет выступать в качестве источника информации.
Наш робот будет двигаться вперед, при попадании на него луча света. Такое поведение устройства называется «фотокинезисом» – ненаправленное увеличение или уменьшение подвижности в ответ на изменение уровня освещенности.
В нашем устройстве, как было сказано выше, использовался фототранзистор n-p-n структуры – PTR-1 в качестве фотосенсора. Здесь можно использовать не только фототранзистор, но и фоторезистор или фотодиод, так как принцип работы у всех элементов одинаковый.
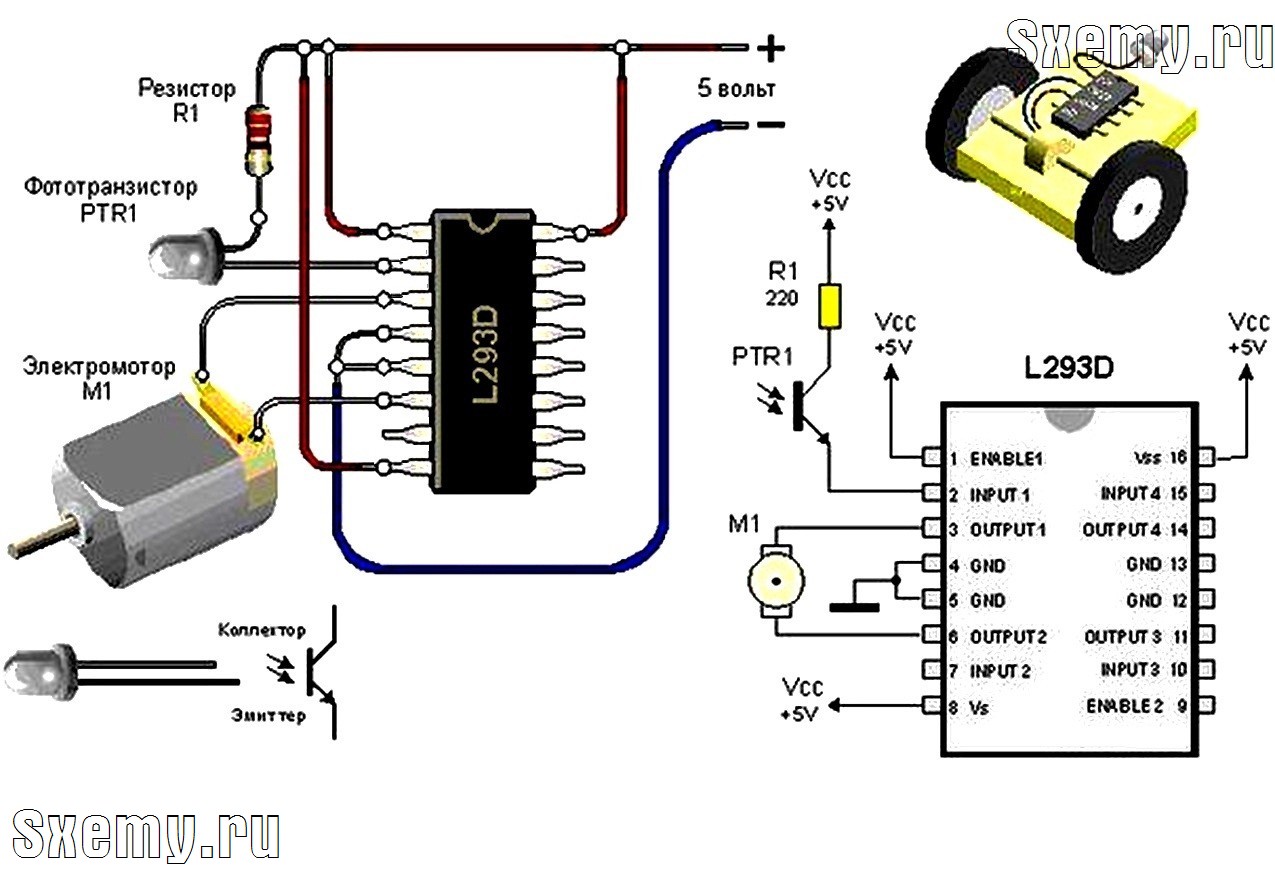
На рисунке сразу приведена монтажная схема робота. Если Вы еще не достаточно хорошо знакомы с техническими условными обозначениями, то, здесь исходя из этой схемы, несложно будет понять принципы обозначения и подсоединения элементов друг к другу.
GND. Провода, соединяющие различные элементы схемы с «землей» (отрицательный полюс источника питания), обычно на схемах не отображают полностью. Вместо этого рисуют маленькую черточку, обозначающую соединение с «землей». Иногда, рядом с черточкой пишут «GND» – от анг. слова «ground» – земля.
Vcc. Данное обозначение показывает, что через эту часть схема соединена с источником питания – Положительный полюс! Иногда на схемах вместо этих букв часто пишут номинал тока. В данном случае +5V.
Принцип действия робота.
При попадании на фототранзистор (на схеме он указан как PRT1) луча света, на выходе микросхемы INPUT1 появляется положительный сигнал, который заставляет мотор М1 – работать. И наоборот, когда луч света перестает освещать фототранзистор – сигнал на выходе микросхемы INPUT1 исчезает, следовательно, и мотор останавливается.
Резистор R1 в данной схеме предназначен компенсации, проходящего тока через фототранзистор. Номинал резистора 200 Ом – конечно можно сюда припаять резисторы и с другими показателями номиналов, но следует помнить, что от номинала будет зависеть чувствительность фототранзистора, а значит и работоспособность самого робота.
Если номинал резистора будет большим, то робот станет реагировать только на очень яркий луч света, а если небольшим – то и чувствительность будет намного выше.
Коротко говоря – не следует использовать в данной схеме резисторы с сопротивлением менее 100 Ом, иначе фототранзистор может просто-напросто перегреться и выйти из строя.
В общем, пища для размышления вам дана. Обратите внимание на схему самой микросхемы. Здесь четко изображены все входы и выходы сигналов. Комбинируя способы подключения моторчика и фоторезистора, вы легко можете изменять поведение этого робота. Более подробно о роботах можно узнать у нашего друга modelist-konstruktor.com
Рекомендуем:
 Цифровой и аналоговый мультиметры Проведение замеров
Цифровой и аналоговый мультиметры Проведение замеров  Чтение схем: экранирование, заземление
Чтение схем: экранирование, заземление  Чтение схем: лампы и фотоэлементы
Чтение схем: лампы и фотоэлементы  Бандаж из червячного хомута для трансформатора
Бандаж из червячного хомута для трансформатора  Ремонт электрического чайника
Ремонт электрического чайника  Часы с проецированием изображения своими руками
Часы с проецированием изображения своими руками  Резак по пенопласту своими руками
Резак по пенопласту своими руками  Как самостоятельно сделать усилитель для наушников
Как самостоятельно сделать усилитель для наушников




I read this paragraph completely regarding the difference
of newest and previous technologies, it’s remarkable article.
I visit day-to-day a few web sites and sites to read posts, however this website gives feature based content.